01 — Facility
Research Facility
An 8m × 8m indoor model city with motion capture, traffic lights, and multiple autonomous vehicles operating simultaneously.

Safe Environment
Test algorithms in a physical 1:6 scale model town — intersections, parking spots, and multi-lane roads with 83.2 cm road width and realistic markings.

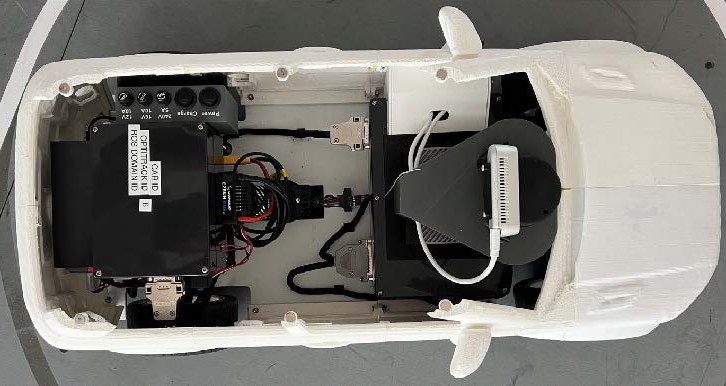
Flexible Data Gathering
Combine onboard vehicle perception (RealSense D435, YDLidar G2) with global OptiTrack motion capture at 30 Hz for ground truth positioning.

Human-in-the-Loop
Connect a full multi-monitor driving simulator for human steering and intervention — bridging automated and supervised driving research.